新聞來源:發(fā)布日期:2021-11-04
感謝您選擇立三機電產(chǎn)品惯斥,本文章針對立三通訊系列步進驅(qū)動器上位機使用進行講解。
第二章:LEESN上位機編程詳細介紹
前面文章熟悉了LEESN上位機設(shè)置,版面介紹以及驅(qū)動器寄存器詳情朗涩。后面章節(jié)要詳細介紹上位機編程及調(diào)試區(qū)的功能和實際編程操控等髓无。
上位機編程及調(diào)試區(qū)功能模塊:
(1)參數(shù)設(shè)置 (2)運動控制
(3)條件/信號跳轉(zhuǎn) (4)輸出控制
(5)設(shè)定信號 (6)點動
(7)表格數(shù)據(jù)管理 (8)其它指令
(9)控制模式設(shè)置 (10)編程控制
(11)編程添加及下載
2.1 參數(shù)設(shè)置 如圖
注:
(1)通訊失敗狀態(tài)下驅(qū)動器值未知孙已,PC存值為默認值或上次有效更改數(shù)值两曼。
(2)通訊成功狀態(tài)下敦迄,上位機讀取驅(qū)動器參數(shù)并顯示钠怯,修改成功后上位機發(fā)送數(shù)據(jù)到指定寄存器暫存佳魔。
斷電保存: 將設(shè)定的參數(shù)下載到驅(qū)動器,再次上電后參數(shù)不再變更為默認值。
?
2.1.1 參數(shù)修改
鼠標點擊對應(yīng)參數(shù)“PC存值”,彈出對話框福信。如果需要修改數(shù)據(jù)務(wù)必先清空數(shù)據(jù)惧仪,再用鍵盤或是鼠標點擊輸入。小數(shù)點通過鍵盤輸入蹲楷,參數(shù)設(shè)置避免負數(shù)輸入蠕艳。確認即可其它參數(shù)設(shè)置操作雷同。
注:無需更改的數(shù)據(jù)可以使用默認值茬蒿。
參數(shù)修改
(1)細分:設(shè)定電機每轉(zhuǎn)㈠圈需要的脈沖數(shù)量磺则;
(2)串口超時:通訊反饋時間。超過設(shè)定時間沒有通訊成功反饋則通訊失敗灌次。0則取消次功能阶徒;
(3)啟動/停止速度:電機由靜止到勻速運行和由勻速運行到停止最小運行速度;
(4)加速/減速時間:電機由靜止到勻速運行和由勻速運行到停止需要的時長颈有;
(5)運行速度:電機勻速運行時的速度虚育;
(6)糾偏電流:閉環(huán)驅(qū)動設(shè)置。改善閉環(huán)驅(qū)動器噪聲表現(xiàn)吁沉;
(7)電流:驅(qū)動器運行最大電流衣式;
(8)空閑電流:開環(huán)驅(qū)動設(shè)置。.驅(qū)動在電機停機狀態(tài)下電流表現(xiàn)檐什;
(9)脈沖延時::電機運行平滑系數(shù)碴卧。越小電機反應(yīng)越慢反之則相反;
(10)運行誤差閾值和停機誤差閾值:設(shè)定丟步報警步數(shù)最小值,參照200步/轉(zhuǎn)(1.8°/STEP)乃正。
2.2 運動控制
2.2.1.電機"脫機"和"使能"住册。"脫機"使電機松開,可以手動干預(yù)機構(gòu)瓮具,不能驅(qū)動荧飞;"使能 "鎖定電機,電機可以驅(qū)動名党。
注:驅(qū)動器通訊正常情況下叹阔,運動控制數(shù)據(jù)輸入后對應(yīng)電機會產(chǎn)生運動挠轴,為避免編程產(chǎn)生不必要的意外,編程調(diào)試時應(yīng)使電機處于"脫機"狀態(tài).圖示:

編程完成后耳幢,再次點擊使能岸晦,電機鎖機,可以正常驅(qū)動痪僵。

2.2.2:參數(shù)修改螃浑。下圖。點擊對應(yīng)參數(shù)欄暮诫,彈出對話框铝琐。如果需要修改數(shù)據(jù)務(wù)必先清空數(shù)據(jù),再用鍵盤或是鼠標點擊輸入霜售。小數(shù)點通過鍵盤輸入瑟毡,正數(shù)表示正向運行,負數(shù)表示反向運行矿退。確認即可其它參數(shù)設(shè)置操作雷同伸果,圖示。

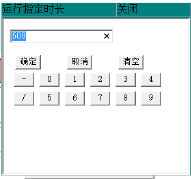
(1)運行指定時長:設(shè)定電機運行多久后停機跪篷;
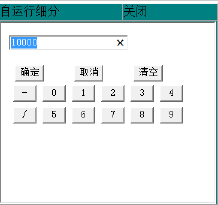
(2)運行指定步數(shù):設(shè)定電機運行多少步后停機刊搁;
(3)運行到指定位置:絕對位置值,相對原點電機運行到位桃姐;
(4)設(shè)定當前值:絕對位置原點偏差補償钻局;
(5)運行中設(shè)定停止位置:檢測到指定信號后,電機變速運行指定步數(shù)后機口柳;
2.2.3:電機正/反向運行苹粟,立即停止和減速停止:
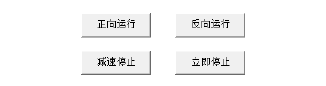
(1)正向運行:點擊后電機正方向㈠直運行;
(2)反向運行:點擊后電機反方向㈠直運行跃闹;
(3)減速停止:點擊后圓形電機緩慢停止嵌削;
(4)立即停止:點擊后運行電機立即停止;
2.2.4 位置控制(操控快捷鍵):如圖
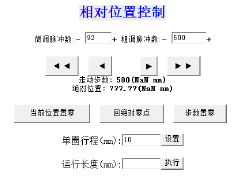
(1)相對單步運行望艺。左邊框為微調(diào)步數(shù)苛秕,右邊框為粗調(diào)步數(shù)。單箭頭為微調(diào)鍵找默,雙箭頭為粗調(diào)鍵艇劫,左右箭頭方向指示電機反轉(zhuǎn)和正轉(zhuǎn);
(2)當前位置置零:將當前位置設(shè)定為新的原點惩激;
(3)回絕對零點:電機運行到原點位置店煞;
(4)步數(shù)清零:上位機快捷鍵,對編程沒有影響咧欣;
(5)單圈行程:絲桿導程浅缸,單位mm;
(6)運行長度:指令絲桿電機運行長度近沐。
注:5-6 為絲桿電機運行數(shù)據(jù)定做庵坛,可以直接生成絲桿電機運行長度指令。
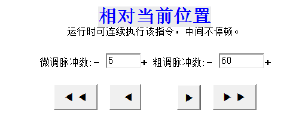
2.2.5:相對當前位置:電機運行過程中象瓤,停止在執(zhí)行運動恼睹,偏移當前位置指定步數(shù)再止。下圖:
左邊框為微調(diào)步數(shù)叨林,右邊框為粗調(diào)步數(shù)狞衷。單箭頭為微調(diào)鍵,雙箭頭為粗調(diào)鍵料鲫,左右箭頭方向指示電機反轉(zhuǎn)和正轉(zhuǎn)久耍;
2.3 條件/信號跳轉(zhuǎn)
指令:跳轉(zhuǎn)指令和等待指令;信號:輸入IN0-IN15 一共16組
默認(IO 5進3出)IN0-IN4為信號輸入端口肝慕,通訊成功時椭皿,顯示端口輸入情況,輸入5-24V時為1孟景,0V信號輸入或懸空時顯示為0刻渔;通訊不成功顯示未知狀態(tài)。下圖:

2.3.1 輸入端口寄存器地址:0x0006(十進制6)
一個16位寄存器,條件跳轉(zhuǎn)/等待是通過查詢指定端口狀態(tài)而執(zhí)行下一條指令让腹。
IN0-IN7 8組輸入狀態(tài)寄存器:有信號輸入為1远剩;0V信號輸入或懸空為0;
IN8-IN9組合電機轉(zhuǎn)子運行狀態(tài)指示:00 空閑骇窍,電機停機狀態(tài)瓜晤;01 即將啟動進入加速狀態(tài);10 即將減速停止腹纳;11 正運行狀態(tài)活鹰;
IN10:實際電機轉(zhuǎn)子位置與控制指令偏差提示:1示有偏差,0示無偏差; IN11: 電機實際位置與設(shè)定值之間關(guān)系 根據(jù)設(shè)定IN11顯示"1"或"0"只估。
2.3.2 條件跳轉(zhuǎn)志群。
根據(jù)實際需要選擇端口無輸入0或是有輸入1時,下一步執(zhí)行跳轉(zhuǎn)指定地址蛔钙;
跳轉(zhuǎn)地址:執(zhí)行跳轉(zhuǎn)指令指向位置锌云,及下一條執(zhí)行的指令;設(shè)定好后吁脱,點擊”添加指令到編程區(qū)”桑涎;
2.3.3 等待指令
等待指定端口狀態(tài)翻轉(zhuǎn)后執(zhí)行下一條指令。等待時間:等待指定時間后再執(zhí)行下一條指令灿躏,等待時間"0"時一直等待直到上條指令執(zhí)行完畢才執(zhí)行下一條指令烈瘸。
2.4 輸出控制
2.4.1 打開輸出: 對應(yīng)寄存器:0x00A0(十進制160)內(nèi)部光耦模擬常開點閉合泳疗,外圍電路構(gòu)成回路;
關(guān)閉輸出:對應(yīng)寄存器:0x00A1(十進制161)內(nèi)部光耦模擬常開點恢復(fù)范般,外圍電路斷路驹莽。
可以通過“直接控制”調(diào)試端口,調(diào)試數(shù)據(jù)暫時有效但不會保存钟展;“添加指令到編程區(qū)”可以將添加指令下載到驅(qū)動區(qū)保存并執(zhí)行烙巩,圖示:

通訊成功將顯示當前端口狀態(tài),通過“選擇”選定指定端口輸出或關(guān)閉肢钙,并可以添加對應(yīng) 指令到編程區(qū)距堂。
2.5 設(shè)定信號
“設(shè)定信號”可以取消默認端口輸出功能,也可以重新定義端口輸出功能遍削。
寄存器地址:0x00A5 (十進制165)

2.5.1:有效輸出端口OUT0-OUT2
(1)設(shè)定報警輸出:將選擇端口設(shè)定為報警輸出
(2)設(shè)定運行輸出:將選擇端口設(shè)定為報警輸出
(3)設(shè)定到位輸出:將選擇端口設(shè)定為報警輸出
當前值:當前端口輸出狀態(tài): 閉合或是斷開吹夏;
控制值:設(shè)定控制有效時端口閉合或斷開。閉合和斷開兩個輸出狀態(tài)是互補的,如報警輸出子擅,如果設(shè)定報警發(fā)生時報警輸出斷開冗懦,則常規(guī)狀態(tài)時報警輸出是閉合的。
直接控制: 可以通過“直接控制”調(diào)試端口仇祭,調(diào)試數(shù)據(jù)暫時有效但數(shù)據(jù)不會保存披蕉;而 “添加指令到編程區(qū)”可以將添加的指令下載到驅(qū)動區(qū)保存并執(zhí)行。
注:開環(huán)時乌奇,默認OUT0(Y0)為報警輸出(報警時閉合);OUT1(Y1)為運行輸出(運行時閉合) 没讲。
閉環(huán)時,默認 OUT0(Y0)為報警輸出(報警時閉合);OUT1(Y1)為到位輸出(到位時閉合) 礁苗。 如果需要重新定義爬凑、打開或關(guān)閉OUT0 或者OUT1, 需要先取消默認輸出功能。
2.6:點動
寄存器地址:0x00CA 下圖:

(1)速度:點動時電機驅(qū)動速度试伙,最大⑸⑴⑴轉(zhuǎn)/分嘁信;
(2)方向:電機運行方向,默認正向運轉(zhuǎn)疏叨,"反向"選擇后運動方向反向潘靖;
(3)急停:停機方式是接到指令電機立即停止;默認減速停止蚤蔓;
(4)運行(運行/停止):選中后驅(qū)動電機運行泛汁,不選則指令電機停止;
2.7:表格數(shù)據(jù)管理
寄存器起始地址:0x00AA
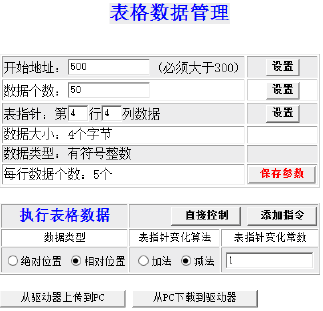
2.7.1:表格數(shù)據(jù)管理
(1)開始地址:表格數(shù)據(jù)保存的起始地址陶焙,默認⑸00寿经,必須避開系統(tǒng)其它有效寄存器存儲區(qū);
(2)數(shù)據(jù)個數(shù):需要加載的數(shù)據(jù)個數(shù)听量,每個個數(shù)為㈠個啟動或停機位置剖坟;
(3)表指針:指向表格數(shù)據(jù)存放的首個位置辆雇,默認位置為0;
注: 填寫完畢點擊設(shè)置绪桑,在“最后操作編程指令區(qū)”生成對應(yīng)指令完冻,直接添加到編程區(qū)。
2.7.2:執(zhí)行表格數(shù)據(jù):表格數(shù)據(jù)設(shè)置完畢后需要設(shè)置表格數(shù)據(jù)執(zhí)行設(shè)定语哺。
(1)數(shù)據(jù)類型:絕對位置。電機驅(qū)動以原點為起始點刑炎,每次數(shù)據(jù)執(zhí)行都會先回原點忽仗,然后按照表格數(shù)據(jù)驅(qū)動到位;
相對位置浦译。電機驅(qū)動以上次停機點為起始點棒假,每次數(shù)據(jù)執(zhí)行都會在上次位置基礎(chǔ)再次按照表格數(shù)據(jù)驅(qū)動到位;
(2)表指針變化算法:加法精盅,表指針由最低點逐次遞增帽哑;減法,表指針由高點逐次遞減叹俏;
(3)表指針變化常數(shù):指針每次指向變化的最小數(shù)妻枕。
2.7.3:數(shù)據(jù)上載和下載
添加到編程區(qū)的指令可以通過下載指令將數(shù)據(jù)下載到驅(qū)動器,也可以通過上載指令讀取寄存器中已經(jīng)保存的數(shù)據(jù)
2.8:其他指令
2.8.1:編程輔助指令:
(1)跳轉(zhuǎn)指令:有當前位置跳轉(zhuǎn)到指向位置執(zhí)行新的指令粘驰;
(2)重復(fù)指令:地址:需要重復(fù)執(zhí)行指令的首位值屡谐;
次數(shù):需要重復(fù)執(zhí)行指令次數(shù)
(3)延時:上條指令執(zhí)行完畢后等待多久執(zhí)行下㈠條指令;默認ms蝌数,最大⑷000ms;
(4)等待停止:上條指令執(zhí)行多久或等待最后結(jié)果后再執(zhí)行下㈠條指令愕掏。"0"時等待指令執(zhí)行完畢后再執(zhí)行下㈠條指令,如碰撞回原點顶伞,㈠直等到原點到位才能執(zhí)行下㈠條指令饵撑,否則㈠直執(zhí)行回原點指令。其他數(shù)值等同等待指令唆貌;

2.8.2:限位拙故,原點和恒力矩模式設(shè)置:
(1)設(shè)置左右限位:寄存器地址:0x00⑼B 點擊“設(shè)置左右限位”彈出對話框;

(2)啟動:勾選則啟用端口為限位點;
(3)檢測值:檢測輸入端電平特性吕得。“⑴”檢測到高電平(⑸-⑵⑷V)信號有效舀闻;“0”檢測到低電平0V信號有效;
(4)選擇端口:選擇IN0-IN15作為對應(yīng)限位輸入端口消耸∈嘱可以參考寄存器設(shè)置詳細說明。
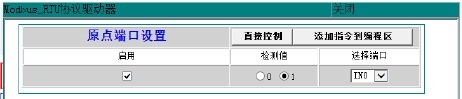
2.8.3 原點端口及回原點設(shè)置
(1)原點設(shè)置租既。點擊原點設(shè)置杖进,彈出對話框袁垄,操作同左右限位;
(2)回原點方式設(shè)置
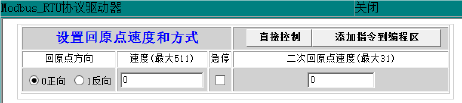
回原點方向:啟動回原點指令后,電機運行方向隧庐;速度:電機執(zhí)行回原點的速度鼓临;
急停:原點到位后電機急停機;二次回原點速度:原點到位再次偏移指定步數(shù)時電機運行速度士袜;
(3)二次回原點設(shè)置

二次回原點方向:“0” 二次正向運行指定步數(shù)再次回原點角黍;“1”二次反向運行指定步數(shù)回原點;
離開原點脈沖數(shù):二次回原點時蔫仙。偏離第一次原點指定步數(shù)后二次回到原點料睛;
(4)恒力矩模式設(shè)置
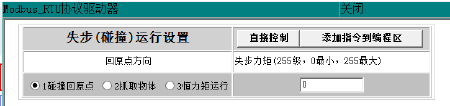
失步(碰撞)運行設(shè)置三種模式:
①碰撞回原點:無需感應(yīng)開關(guān),電機運轉(zhuǎn)摇邦,通過設(shè)定力矩完成原點到位檢測恤煞;
②抓取物體:以系統(tǒng)設(shè)定速度抓取物體,達到設(shè)定力矩時抓取狀態(tài)保持施籍;
③恒力矩運行:以系統(tǒng)設(shè)定最大速度運行居扒,速度與阻力反比,阻力達到設(shè)定力矩時保持丑慎,阻力小于設(shè)定力矩時喜喂,電機繼續(xù)運轉(zhuǎn)失步力矩(0-255級,數(shù)值越大竿裂,力矩越大)
注:力矩模式必須是閉環(huán)驅(qū)動系列才支持夜惭。
(5)恒力矩運行設(shè)置
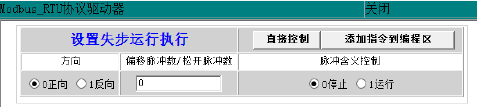
①方向:很力矩模式時電機運行方向;“0”正向運行铛绰;“⑴”反向運行诈茧。
②偏移脈沖數(shù)/松開脈沖數(shù):碰撞回原點偏移指定脈沖作為新原點或是抓取物體后松開指定步數(shù);
③脈沖含義控制:“0”停止執(zhí)行力矩模式丈巩;“1”開始執(zhí)行力矩模式粗线;
(6)自定義通用指令:編程可以通過上位機指定按鈕設(shè)置添加,也可以通過直接讀/寫指定寄存器值實現(xiàn)

①寄存器大小:單條指令超丛;⑴⑹位寄存器指令蚂霎;⑶⑵位寄存器指令;
②寄存器地址:目標寄存器地址逢棺;
③寄存器值:指定寄存器中要寫入的數(shù)值贷挠;
如驅(qū)動器細分設(shè)置:
細分設(shè)置寄存器地址:0x0007;為16位寄存器篱馅;設(shè)定細分為3200春环,添加指令到編程

等同上位機按鈕輸入。

2.9 控制模式設(shè)置
4.9.1 IO控制模式:通訊系列驅(qū)動器默認控制模式,有效電平信號范圍(0-24V)沟密;
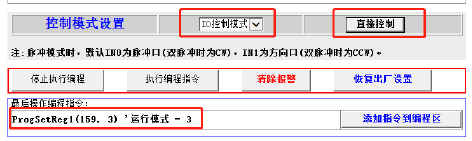
選定控制模式--點擊直接控制(暫時調(diào)試贱着,重新上電后恢復(fù)成驅(qū)動器保存模式,同時)生成指令--添加指令到編程區(qū)--下載后保存并執(zhí)行痹换。
4.9.2 雙脈沖控制模式:差分(脈沖)信號有效征字。默認IN0正向運行端口;IN1反向運行端口娇豫;操作同4.10
4.9.3 脈沖&方向:默認IN0為脈沖驅(qū)動端口匙姜,且為正向運行端口;IN1為方向控制端口冯痢,高電平信號(5-24V)有效輸入氮昧。操作同4.10.1
注:退出雙脈沖或脈沖&方向模式,直接設(shè)定為IO控制模式即可系羞。
2.10 編程操作
2.10.1 編程添加及下載

(1)停止執(zhí)行編程郭计。點擊后霸琴,驅(qū)動器停止執(zhí)行運行指令椒振,并跳轉(zhuǎn)到編程首位;

(2)執(zhí)行編程指令梧乘。點擊后澎迎,驅(qū)動器開始從編程首位執(zhí)行指令;

(3)清除報警:驅(qū)動器報警狀態(tài)下选调,清除異常夹供,并重啟動驅(qū)動器;

(4)恢復(fù)出廠設(shè)置:將驅(qū)動器指定寄存器數(shù)據(jù)更改成默認數(shù)據(jù)值臭呀。

(5)最后操作編程指令:寄存器操作后對話框會生成一條指令喂磷,可以通過“添加指令到編程區(qū)”將指令添加到編程區(qū),并可以下載保存到驅(qū)動器聊树。

(6)編程處理 :指令添加完成后欲访,可以通過上/下移動,調(diào)整指令位置峦筏;刪除掉不需要的指令宏动、或是清空編程區(qū)指令;
從驅(qū)動上傳程序到PC:將驅(qū)動器已下載好的程序上載到PC上位機蒂鹏,點擊"從驅(qū)動器上傳程序到PC"后刷新即可在編程區(qū)顯示斜孩,可以再次編輯或是下載;
從PC下載程序到驅(qū)動:將編程區(qū)程序下載到驅(qū)動器后艳禁,點擊“執(zhí)行編程指令”或是驅(qū)動器重新上電臀胞,即可執(zhí)行編程指令。
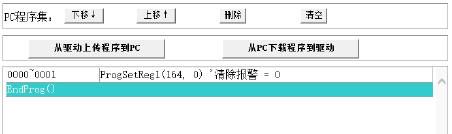
(7)控制器存儲程序集:下載指令完成后,此頁面將顯示已經(jīng)下載的程序饺饭。不可編輯
2.11 編程 *.PC文檔處理
如果有現(xiàn)成的編程文件,不需要重新編程,可以直接拿來使用渤早。
PC上位機最大支持64臺從機,1~32從機可以通過上位機編程和控制且程序以*.PC文檔格式保存瘫俊,33-64節(jié)點只能通過上位機控制鹊杖,不能生成編程文件保存。
打開工程文件夾扛芽,如保存成"Project1" - 打開文件夾Binr ,所有編程文件按照6.1骂蓖,6.2,6.3 川尖。登下。。叮喳。6.32 文件名保存被芳。

文件名一一對應(yīng)上位機狀態(tài)欄從機序號,不分RTU和TCP驅(qū)動器馍悟。
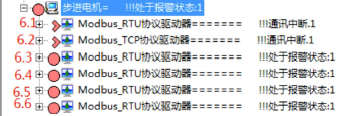
6.1.PC即對應(yīng)第一個Modbus_RTU協(xié)議驅(qū)動器畔濒;6.2.PC即對應(yīng)第二個Modbus_TCP協(xié)議驅(qū)動器等等。
目前處理的方式有兩種:
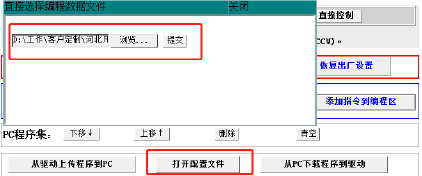
1. 直接復(fù)制替換原 *.PC文件.將目標文件修改成要替換的*.PC相同的文件名锣咒,復(fù)制到"Binr"文件夾,確認替換.回到操作界面刷新即可將程序加載到編程區(qū);
2. 通過加載配置文件.圖示,點擊"打開配置文件"--"瀏覽..."選擇指定加載*.PC文件恬皆,確認"提交"將指定程序?qū)氲骄幊虆^(qū)。
2.12 上位機編程執(zhí)行的原理及寄存器仆洞,編程區(qū)應(yīng)用說明
由前面介紹可知众附,修改電機運行參數(shù)有直接設(shè)置和寫入編程區(qū)中設(shè)置兩種方式。
2.12.1 直接設(shè)置:
通過上位機甘直、PLC或觸摸屏等帶有RS485通信功能的設(shè)備直接對《485通訊手冊》中地址范圍為0x0000~0x012B的寄存器進行修改操作刮跟,這種修改方式修改電機運行參數(shù)是立即生效的。這個修改過程可以理解為將出廠時寄存器的缺省值修改為用戶所需要的值后臨時保存在芯片的RAM中呐蹂,修改后以RAM中的參數(shù)進行相應(yīng)的動作唬垦,由于是保存在RAM中,所以不執(zhí)行保存命令的話蔬透,重新上電后修改的值將丟失棱歹,電機運行參數(shù)將按照相應(yīng)寄存器出廠時的缺省值進行配置。若執(zhí)行了保存命令之后发荧,RAM中的修改的寄存器的值將會更新并保存在ROM中馁梁,在下一次上電時,這些修改后的值將會變成缺省值刃唤。
2.12.2 編程區(qū)中設(shè)置:
編程區(qū)的地址是從0x12C(300)處開始的隔心,因此編程區(qū)中的地址都需要加上300才是實際的地址。通過上位機在編程區(qū)中寫入用戶需要修改的參數(shù)后,需要將程序下載到驅(qū)動后重新上電才能生效硬霍,下載后程序被保存在芯片的ROM中帜慢,因此斷電后不會丟失。驅(qū)動器會根據(jù)修改的參數(shù)對電機運行參數(shù)進行配置唯卖。
在編程區(qū)中設(shè)置了電機的運行參數(shù)后同樣有兩種方式去修改對應(yīng)的參數(shù)粱玲,以圖3為例,編程區(qū)中將電流值修改為3A拜轨,如果需要需要再次修改電流值(修改其他參數(shù)也一樣)抽减,可以根據(jù)《485通訊手冊》查詢到電機額定電流寄存器的地址,然后往這個地址中寫入需要修改的值橄碾,修改后立即生效卵沉,但是通過這種方式修改后不管有沒有保存修改值,重新上電后電機的額定電流值還是3A法牲,具體原因?qū)⒃诤竺娼o出史汗。
另外一種方式是通過修改編程區(qū)中的電流指令,圖3中修改電流的指令為0x0002~0x0003牡泡,前面分析了姥勤,編程區(qū)地址是從300開始,因此編程區(qū)中修改電流的地址實際是302和303诲狐,可以把地址302理解為新的電流寄存器的地址斗赘,地址303理解為保存電流值的地址拟艳⌒罚基于此,用戶可以通過修改地址303的值來實現(xiàn)修改電流的目的悦浙,這個修改同樣是立即生效的愤栽,執(zhí)行保存命令后,再次上電挟七,電機額定電流將會是修改后的值齿喧,否則還是修改之前的值。流程下圖示相贺。
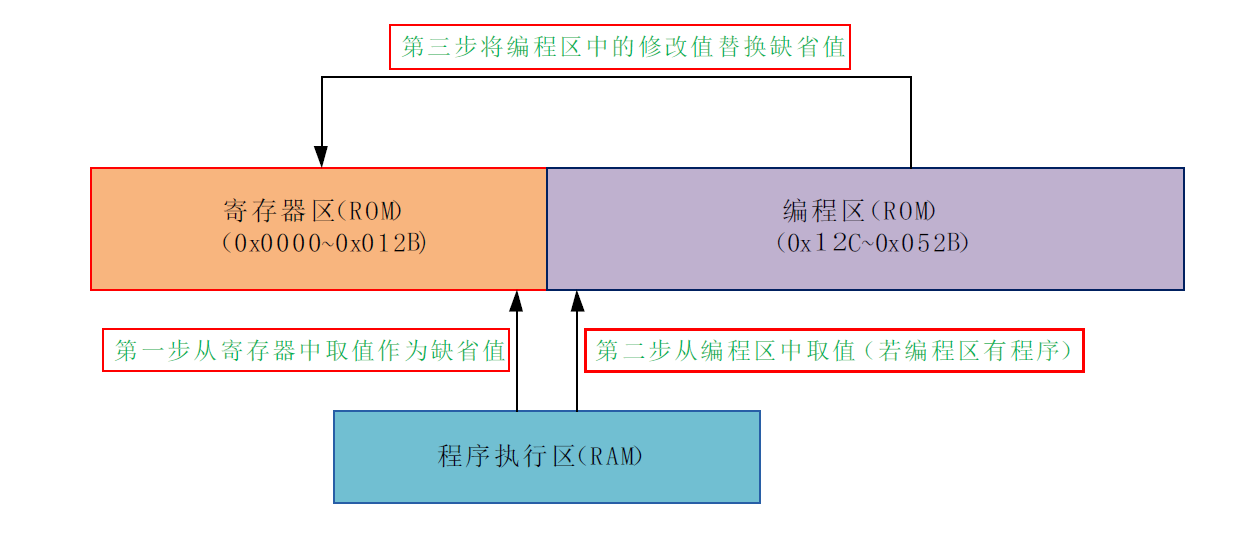
程序上電初始化時先將寄存器區(qū)中的參數(shù)作為缺省值轻欣,若編程區(qū)中沒有程序,則初始化參數(shù)結(jié)束肃弟,若編程區(qū)中有程序玷室,則會將編程區(qū)中的參數(shù)取出,并覆蓋之前從寄存器中取出的值笤受,并作為新的缺省值穷缤,因此當編程區(qū)有程序時,若是直接對寄存器區(qū)的相應(yīng)寄存器值進行修改,重新上電后都會被編程區(qū)中修改的值所覆蓋津肛。直接修改寄存器值和修改編程區(qū)中指令的方式都是在程序執(zhí)行區(qū)的動作章喉,因此會立即生效。
未完待續(xù).......
如遇其他問題身坐,請聯(lián)系我司工程師秸脱!
